Documentation for “Zerocat Chipflasher: ‘kick’”
Generated on: Wed, 24 Jun 2026 07:29:00 +0200
Repository: git://zerocat.org/zerocat/projects/chipflasher.git
Board: board-v2.2.0-2420-b445ef922
Version: v3.0.0-0-b445ef922
Branch: master
kickconnect.kick, the First FirmwareTo configure kick for board v2.2.0 (e.g. Chipflasher v2.1), the
default, type:
[env]$ make -C ../../firmware1/src config-BOARD_V2_2
To configure kick for board v2.0.0 (e.g. Chipflasher v2), type:
[env]$ make -C ../../firmware1/src config-BOARD_V2_0
To configure kick for board v1.1.0 (e.g. Chipflasher ‘board-edition-1’),
type:
[env]$ make -C ../../firmware1/src config-BOARD_V1
The host utility and the firmware use a serial connection for their communication. The speed of that connection is specified as baudrate.
The default baudrate is: 115200
Baudrate configuration is retrieved from file ../../firmware1/start/board.cfg, which in turn is managed via ../../firmware1/start/Makefile.
To build kick, type:
[env]$ make -C ../../firmware1/src kick
To get a full list of available targets, type:
[env]$ make -C ../../firmware1/src help
To clean files and folders, type:
[env]$ make -C ../../firmware1/src clean
kickTo upload kick to onboard, free-design RAM, type:
[env]$ make -C ../../firmware1/start upload-RAM
To upload kick to onboard, proprietary-design EEPROM, type:
[env]$ make -C ../../firmware1/start upload-EEPROM
To get a full list of available targets, type:
[env]$ make -C ../../firmware1/start help
The chip flasher not only accesses the main memory array of SPI chips, it also gives you full control over the chips’ configuration registers:

Set register values using `kick-connect', the first firmware.
In case of chips made by Macronix, it even provides access to the lock bits of the security register, as well as to the secured, one-time-programmable region of these chips (typically 64 bytes in size):

Write and read SOTP Region using `kick-connect'.
Clean up and lock the region, before someone else will do it!
Clean-up Examples:
Thank you for trying kick, the first firmware, with Zerocat
Chipflasher ‘board-edition-1’!
Zerocat Chipflasher is your free-design hardware tool for flashing free firmware to BIOS chips. See #../../doc/targets.md for supported chips and targets.
Parallax Propeller P8X32A free-design microcontroller
The core of the chip flasher...
Onboard EEPROM (non-free chip design)
May be used optionally for long-term firmware storage.
Power Switch, Power Status LED and SPI Power LED
The switch gives a good tactile feedback when powering the flasher and the LEDs clearly reflect the power status of the onboard regulators.
Software status LEDs
RST Pin is muted and allows starting from RAM.SPI-Bus Status LED (red)
When powered, the SPI-Bus is in use and the SPI chip is powered. Do not disconnect the SPI-Plug or test-clip if this LED is active!
Variable pull-up, allows to drive the SPI-CE#-line with a dedicated strength.
Use a screw-driver clockwise to adjust the pull-up to its highest value, thus resulting in the weakest driver strength. Then turn counter-clockwise until access to your target is reliable.
USB powered, typical load: 1.000mA maximum
In order to delimit power dissipation, an input voltage of 5VDC is recommended. Do not use any input voltages above 6VDC.
The typical load current won't exceed 1.000mA. Note the chip flasher board uses a Polyfuse which will shut off the board if drawing currents in excess of 1.500mA.
Data connection: RS232, pinheader-5x2
SPI connection: +3.3VDC/GND, pinheader-9x1
Handy dimensions (lenght x width x height) approx. 100 x 80 x 80mm
Pinout info for each connector right on the chip flasher’s front panel.
Accessories
Standard add-ons
Options upon request
The typical setup requires a host that has an RS232 serial port available, as the chip flasher board doesn't provide its USB port for data, it is used for power only.

Zerocat Chipflasher, typical setup with an Y-USB-Cable
We recommend to drive the flasher with a liberated 64bit X60 ThinkPad (e.g.: running free-licensed firmware). These machines can be flashed with the flashrom user space utility. A serial port is part of their docking station.
A typical setup looks like this:
Computer with RS232 port, i.e.:
The Zerocat Chipflasher
supported SPI flash chip, a single one or one soldered in place on its system board (section #../../doc/targets.md)
external USB-Power-Adapter (5V @ 1000mA) or at least two USB-ports from the computer.
You will use three cables for connection:
the USB cable for 5V power supply of the chip flasher board
(If you use two USB ports for power, use an Y-USB cable.)
RS232 data cable for data transfer between host and chip flasher
SPI-cable (8 wires, length about 20cm) with 8pin-DIL-socket or SMD-test-clip to attach the target SPI flash chip
+------------+ +-------------+ +·············+
| Host, i.e. | | Zerocat | +---------+ :
| X60 + | | Chipflasher |---+3.3V-->| SPI | :
| Docking |<--RS232-data-->| |<---SPI--->| Chip | :
| | | firmware: | +---------+ :
| software: | +--+5V--->| `kick' | : :
| `connect' | | +-------------+ : Systemboard :
+------------+ | : without :
+--------------------+ : Battery :
| External USB Power | : nor Power :
| 5V @ 1000mA | +·············+
+--------------------+
+------------+ +-------------+ +·············+
| Host, i.e. | | Zerocat | +---------+ :
| X60 + |<--RS232-data-->| Chipflasher |---+3.3V-->| SPI | :
| Docking | | |<---SPI--->| Chip | :
| |----+-+5V-USB-->| firmware: | +---------+ :
| software: | / | `kick' | : :
| `connect' |--+ +-------------+ : Systemboard :
| | : without :
+------------+ : Battery :
: nor Power :
+·············+
WARNING: Proceed on your own risk!
Discharge your body (touch any grounded metal like a water pipe) and make sure your are not electrostatically charged.
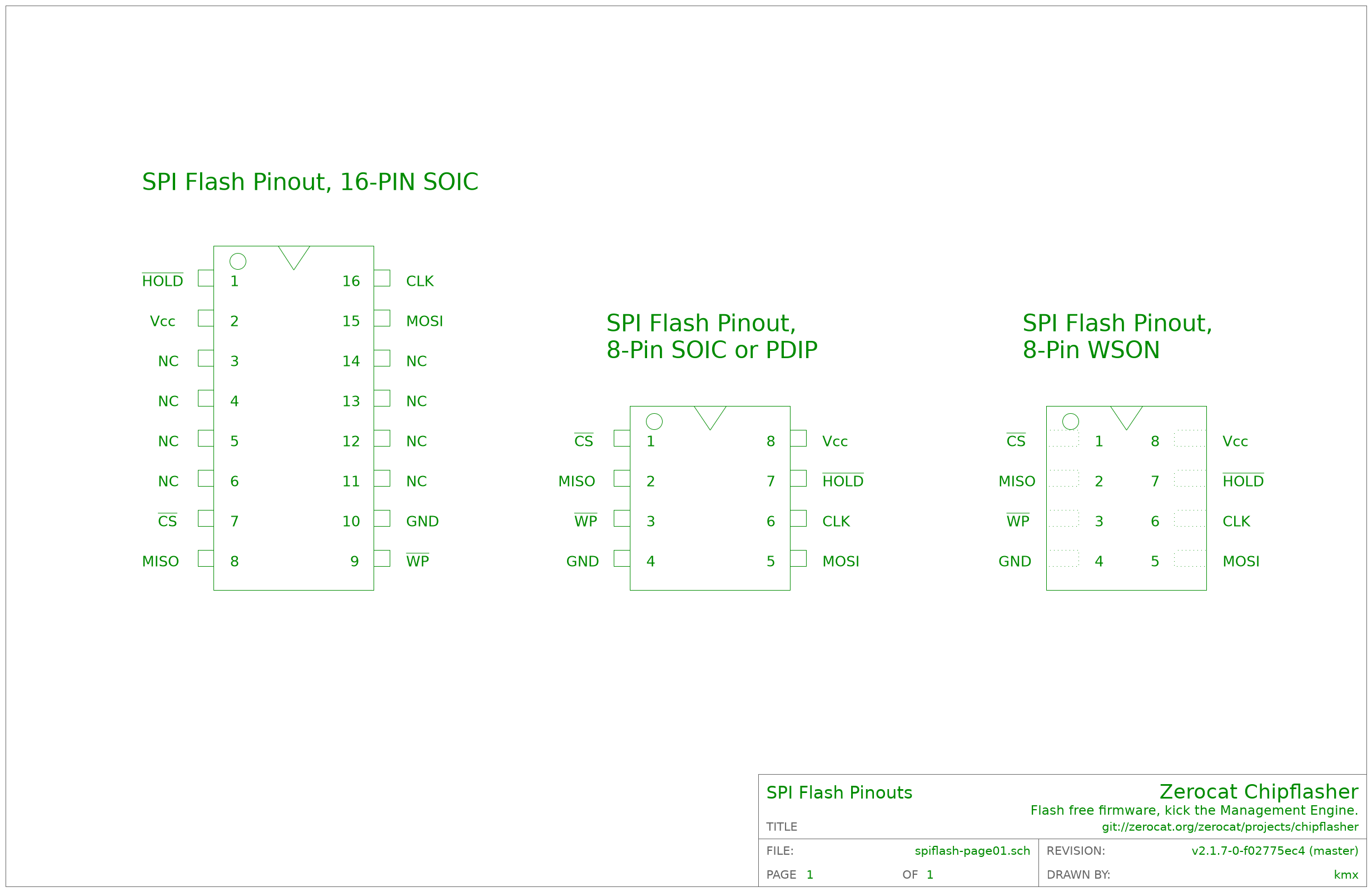
If you are flashing a system board (aka mainboard):
Power and GND will be applied to the SPI-chip by the chip flasher board only.
Make sure you have not mixed these wires!
See ../../hardware/gschem/spiflash-page01.sch.png for pinouts.
To power the chip flasher:
You may safely use your computer’s USB port according to official specs if you are going to flash a single desoldered chip.
In case of flashing chips in situ, soldered onto sysboards, please use an external USB-Power-Adapter (5VDC @ 1.000mA).
As a workaround, you may try a non-standard Y-USB-Cable which should work well in many cases, as the maximal requested current per USB port typically won't exceed 500mA. See #../../doc/power-profiles.md to get into details.
The Zerocat Chipflasher is a handmade tool with long wires/open case that may catch or generate electromagnetic interference. To give you an idea about clock pulse quality and speed, we probed the signals right at the test-clip for you. The maximal SPI clock speed should be above 2.5MHz.

Zerocat Chipflasher, typical clock pulse quality; here: 2.2MHz
The software connect and the firmware kick are talking to each
other via serial RS232 lines. Occasional transmission errors will
be repaired automatically. However, if you encounter severe connection
problems that render you helpless when trying to verify your data, boot
the host with WLAN and network switched off, make sure that no other
resource demanding process will start up (e.g. browser), and try again.
As long as the SPI-Bus Status LED (red) is not active, the SPI-Chip is not powered and you may feel free to connect/disconnect your target. However, if the LED is active, don't touch the connection!
If the system hangs for any reason, you should be save to kill the chip flasher’s power, because all SPI bus pins are configured to enter a harmless tristate mode right at brown-out or power-off. However, you might notice some flickering¹ of the SPI-Power LED, so better do not rely on that procedure.
¹ fixed with Chipflasher v2 design
It is assumed that you have followed the steps mentioned in #../../doc/README.md and now have two terminal windows available, with proper environments set up, i.e. Terminal#1 and Terminal#2.
Connect host and chip flasher with each other, i.e. attach the Y-USB-power-cable to two USB-Ports, attach the RS232-data-cable.
Attach the SPI-cable, but omit the target board (or chip) for now.
Switch the chip flasher device on and verify that the power status LED is bright.
Use a screwdriver to adjust the flasher’s CE# pull-up resistor to its clock-wise maximal position, that is to its biggest value.
Attach the free pinheader connectors of the SPI-cable to the SPI-Chip...
WARNING: You must not mix wires! See ../../hardware/gschem/spiflash-page01.sch.png and check pinouts in advance.
Change the directory to ease operation:
[env]$ cd ../../host/start/
Get familiar with targets, provided by ../../host/start/Makefile.kick:
[env]$ make -f Makefile.kick help
Get familiar with targets, provided by ../../host/start/Workflow.mk:
[env]$ make -f Workflow.mk help
The flasher is operated via two terminal windows in parallel:
Terminal#1 is used to start and operate the flasher via menu.
In order to initiate the kick firmware upload into free-design
RAM, and to start the connect utility, type:
[env]$ make -f Makefile.kick kick-v1-connect-115200-RAM
[env]$ make -f Makefile.kick connect-115200
The flasher’s menu should appear on screen:

Screenshot: Start from RAM
Terminal#2 is used to monitor in- and outgoing chip data.
Learn about typical, standard workflows and type:
[env]$ make -f Workflow.mk workflow-chip-read
[env]$ make -f Workflow.mk workflow-chip-write
Learn about typical workflows for targets with virtual 12MB chips:
[env]$ make -f Workflow.mk workflow-virtual-chip-read
[env]$ make -f Workflow.mk workflow-virtual-chip-write
Feel free to switch between terminals as required.
In Terminal#1, select d: probe chip in order to probe the
BIOS-chip for its ID:

Screenshot: Probe Chip
Use a screwdriver in counter-clock-wise direction to adjust the CE# pull-up resistor to smaller values until your chip gets clearly detected. See #../../doc/targets.md.
Select ?: show menu to get a verbose menu output:

Screenshot: Show Menu
Select c: read chip in order to store chip’s content in your
first chip2file.txt.
WARNING: Consider to create backups between read operations, as
file chip2file.txt gets overwritten without prompt!
Switch to Terminal#2 in order to monitor and manipulate in- and outgoing chip data.
use predefined targets of ../../host/start/Workflow.mk, for instance:
Type
[env]$ make -f Workflow.mk list
to get existing I/O files listed.
Continue to Operate the Flasher via Menu (Terminal#1)
You may now use the menu for dumping, erasing, flashing, verifying your chip. Check register bits for appropriate configurations.
WARNING: Proceed with care, you may brick your machine!
Potentially dangerous hotkeys are all upper case, thus
protecting you from accidental key hits as long as <CAPS-LOCK> is
inactive.
When using the menu, wait until your selected procedure finishes.
With q: cancel/(SPI-Bus off)/quit you may cancel it at any
time.
When done, hit q in order to quit connect.
NOTE: In case the SPI bus has been left powered after chip
detection due to volatile bits in status registers, it is powered
off as an intermediate step before you actually quit the program
with an additional q.
Detach the SPI-cables from the target SPI-chip and power off the flasher device.
Remember to plug a system board’s coin-battery back in.
Done!
Until now, we have taken care to always start from free-design RAM
using the make -C ../../host/start/ -f Makefile.kick upload-RAM command.
The pre-flashed firmware in the onboard EEPROM has not been touched,
yet.
If you want to try the pre-flashed firmware, type:
[env]$ make -C ../../host/start/ -f Makefile.kick reset
[env]$ make -C ../../host/start/ -f Makefile.kick connect-115200
If you want to upload a newly built firmware and make things permanent, type:
[env]$ make -C ../../host/start/ -f Makefile.kick upload-EEPROM
connect (Terminal#1)Alternatively, you might invoke the connect utility manually:
Adjust the port pointer, e.g.:
[env]$ ln -sf /dev/ttyS1 ../../host/start/tty_port_pointer
Clean and compile connect, the utility:
[env]$ make -C ../../host/src/ clean
[env]$ make -C ../../host/src/ connect
Configure and compile kick, the firmware:
[env]$ make -C ../../firmware1/src/ clean
[env]$ make -C ../../firmware1/src/ config-BOARD_V1
[env]$ make -C ../../firmware1/src/ kick
Adjust baudrate and upload kick to RAM:
[env]$ make -C ../../firmware1/start/ config-57600
[env]$ make -C ../../firmware1/start/ upload-RAM
Invoke connect with matching parameters, i.e.:
[env]$ ../../host/src/connect\
../../firmware1/start/chip-out.txt\
../../firmware1/start/chip-in.txt\
../../host/start/tty_port_pointer\
B57600
In order to process in- and outgoing data via
../../host/start/Workflow.mk, update macros ROOT_HOST_IO,
CHIP2FILE and FILE2CHIP according to your choices.
Clean-up your custom configuration:
[env]$ make -C ../../firmware1/start/ clean-config
{kind=link}